
Рассмотрим общий порядок построения графика (кинематической диаграммы) линейных и угловых перемещений исследуемого звена плоского рычажного механизма.
По заданию необходимо построить график перемещений звена 5. Если это звено совершает возвратно-поступательное движение, то строится график линейных перемещений.
Другие примеры решений >
Помощь с решением задач >
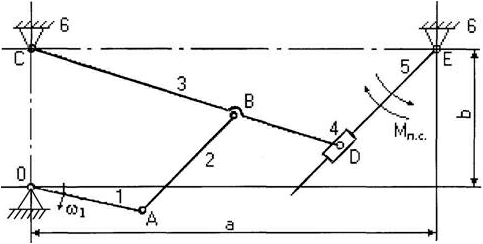
В рассматриваемом примере надо построить график угловых перемещений пятого звена. Отсчет перемещений ведем от одного из крайних положений звена, например от верхнего.
Измерение углов удобно проводить в радианах через соответствующую дугу (рисунок 2).

где КЕ – произвольно выбранный радиус (обычно 100 мм).
После определения углов поворота для всех двенадцати положений проводим оси координат и на оси абсцисс откладываем отрезок (рекомендуется брать L= 240 мм), представляющий собой в масштабе Kt время Т одного полного оборота кривошипа.

где n1 – частота вращения кривошипа в об/мин.
Разбиваем отрезок L на 12 равных частей, что соответствует 12 положениям механизма, и, назначив масштаб углов поворота Kψ (размерность рад/мм), откладываем вдоль оси ординат в каждом положении соответствующие угловые перемещения звена 5. Построенный график называется кинематической диаграммой угловых перемещений (рисунок 3а).
Если исследуемое звено совершает поступательное движение, то измеряются расстояния этого звена от его нулевого положения во всех положениях механизма, и строится диаграмма линейных перемещений.
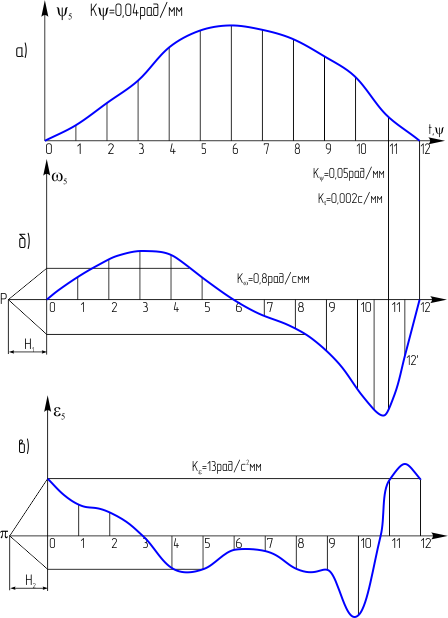
Рисунок 3 – Кинематическая диаграмма угловых перемещений, скоростей и ускорений пятого звена
Построение диаграмм скоростей и ускорений методом графического дифференцирования >
Курсовой проект по ТММ >