Построение профиля кулачка выполняется методом обращения движения. Для этого вычерчиваются окружность минимального радиуса и нулевое положение толкателя (толкатель опирается на окружность минимального радиуса).
Всем звеньям кулачкового механизма придается угловая скорость (- ωкул).
Кулачок становится неподвижным, а толкатель со стойкой получают обращенное движение. Строят «n» положений толкателя в его обращенном движении и на каждом из них откладывают перемещения толкателя вдоль его оси в соответствии с заданным законом движения.
Соединив отмеченные точки плавной кривой, получают теоретический профиль кулачка (рисунок 50).
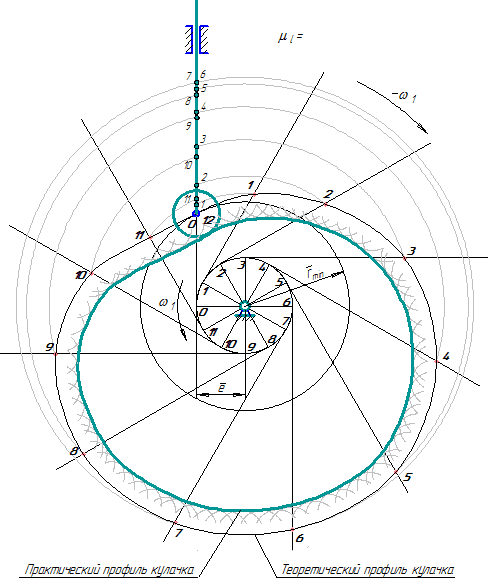
Рисунок 50
Приняв некоторое значение радиуса ролика (rрол), проводят ряд окружностей (засечек) этим радиусом с центром на теоретическом профиле. Внутри теоретического профиля проводят огибающую к этим окружностям (засечкам).
Полученная кривая представляет собой практический профиль кулачка. Радиус ролика выбирается из конструктивных соображений. Он может быть любым, но не больше минимального радиуса кривизны теоретического профиля (иначе произойдет самопересечение практического профиля и его заострение). Часто в качестве ролика принимают один из стандартных подшипников качения подходящих размеров.
Особенностью построения профиля кулачка с плоским толкателем является то, что положение толкателя определяется положением его тарелки. После того, как будут отмечены точки, показывающие положение толкателя в обращенном движении, необходимо через эти точки провести тарелку под углом 90° (или в общем случае под углом γ) к соответствующему положению оси толкателя. Огибающая к этим положениям тарелки в обращенном движении представляет собой профиль кулачка (рисунок 51).
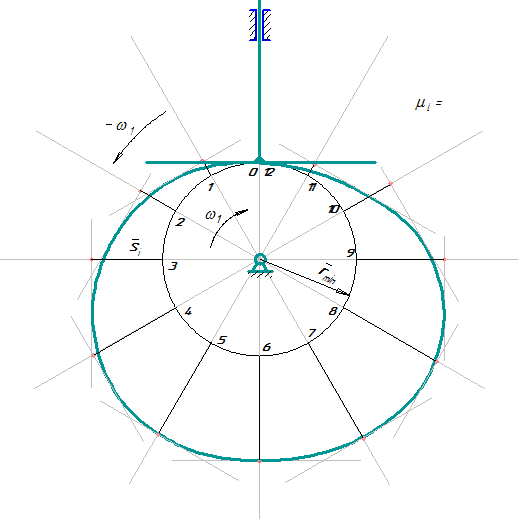
В данном случае теоретический и практический профили совпадают. Если выбрано небольшое количество положений для построения, то тарелка в обращенном движении образует некоторый многоугольник, в который и надо вписывать профиль.
При этом кривая, формирующая профиль, должна касаться всех положений тарелки в обращенном движении.
Далее: