Рассмотрим общий порядок проектирования кулачковых механизмов с поступательно движущимся точечным или роликовым толкателем.
Строим график зависимости аналога скорости толкателя от его перемещения S»=f(S).
Для этого на вертикальной оси отмечаем перемещение толкателя для n положений (обычно рассматривается 12 положений механизма).
Из полученных точек вдоль горизонтальной оси в том же масштабе откладываем аналоги скоростей для соответствующих положений механизма. При этом на фазе удаления S’ откладывается влево, а на фазе приближения – вправо, если угловая скорость кулачка (ω1) направлена против часовой стрелки.
Если угловая скорость кулачка направлена по часовой стрелке, то соответственно на фазе удаления толкателя S’ откладывается вправо, а на фазе приближения влево. Через концы отрезков S’ проводим плавную кривую. Проведя к этой кривой касательные под углом γmin (справа и слева), получаем разрешенную зону (не заштрихованная область на рисунке 15) для выбора центра вращения кулачка.
Так как в задании требуется спроектировать механизм минимально возможных размеров, то центр вращения кулачка надо выбирать в разрешенной зоне как можно ближе к ее границам (обычно берут с небольшим запасом до 10%).
При этом центр вращения кулачка берется на продолжении оси толкателя, если механизм центральный (rmin на рисунке 15). Если механизм внецентренный, то центр вращения кулачка берется на расстоянии эксцентриситета

от оси толкателя (r’min на рисунке 15).
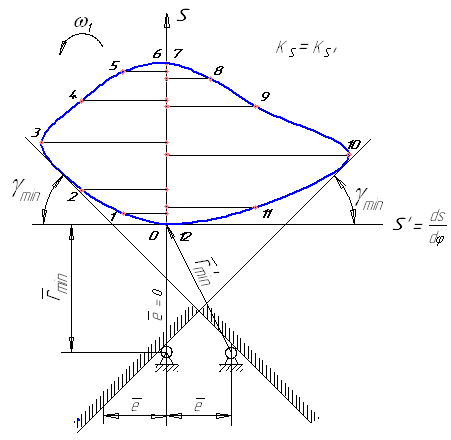
Рисунок 15 – К динамическому синтезу кулачкового механизма с поступательно движущимся роликовым толкателем
Далее: