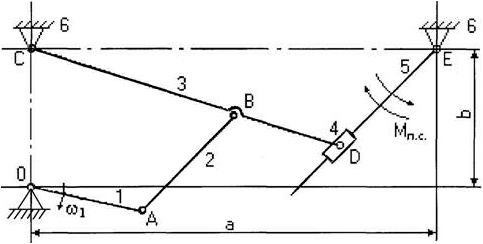
Рассмотрим порядок построения плана положений звеньев и их точек на примере кинематической схемы плоского рычажного механизма.
Кинематическая схема механизма строится в масштабе. Под масштабом в ТММ понимается количество истинных единиц измеряемой величины, заключенное в 1 мм чертежа.
Такое понятие позволяет изображать в виде отрезков на чертеже любые параметры (линейные размеры, перемещения, скорости, ускорения, время, силы и др.).
Например:

где Kl – масштаб линейных размеров (масштаб длин);
АВ – истинный размер некоторого отрезка АВ в м;
__
АВ – длина этого отрезка на чертеже в мм;
где KV – масштаб скоростей;
VA – истинная скорость некоторой точки А в м/с;
_
va – длина отрезка на чертеже в мм, изображающего данную скорость.
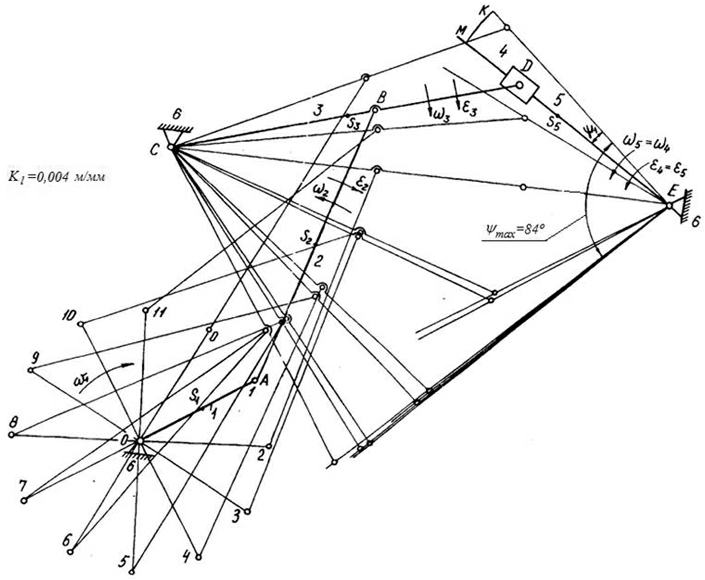
Рисунок 2 — План положений механизма
Чертеж, представляющий собой ряд последовательных положений звеньев механизма, соответствующих полному циклу его движения, называют планом положений механизма. Обычно при графическом методе рассматривается 12 положений механизма (см. рисунок 2).
Непрерывные линии, соединяющие на плане последовательные положения одноименных точек, дают траектории движения этих точек.
Далее: