Плоской системой сил называется совокупность сил, линии действия которых находятся в одной плоскости.
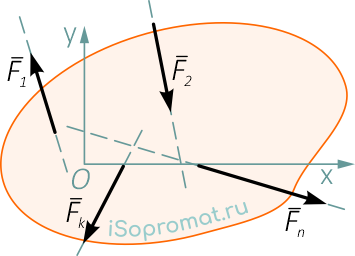
Рисунок 1
Главным вектором системы сил называется вектор, равный векторной сумме этих сил (Рисунок 2):

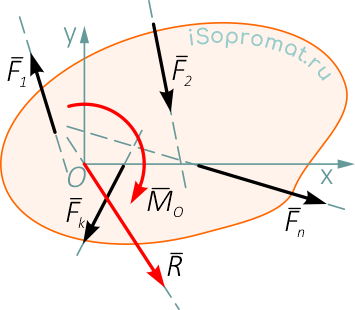
Рисунок 2
Главным моментом системы сил относительно точки O тела, называется вектор, равный векторной сумме моментов всех сил системы относительно этой точки:
![]()
Произвольной плоской системой сил называется общий случай, когда линии действия всех сил не пересекаются в одной точке и минимум две силы непараллельны (Рисунок 1).
Плоской системой параллельных сил называется частный случай, когда линии действия всех сил приложенных к твердому телу параллельны (Рисунок 3).
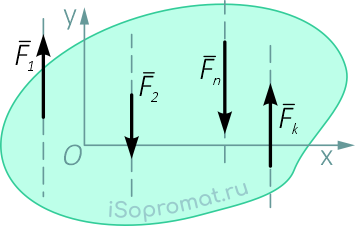
Рисунок 3
Плоская система сходящихся сил – это второй частный случай, когда линии действия всех сил приложенных к твердому телу пересекаются в одной точке (Рисунок 4).
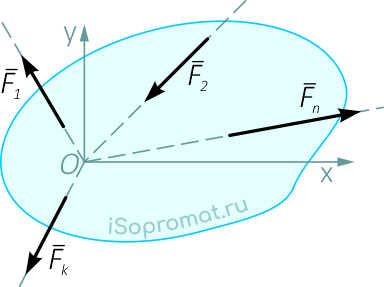
Рисунок 4
Далее: