Кинематической парой называется подвижное соединение двух звеньев.
Рассмотрим классификацию и примеры кинематических пар:
Классификация кинематических пар
Кинематические пары классифицируются по различным признакам:
1) по числу связей, накладываемых на относительное движение звеньев, соединенных в кинематическую пару. По этому признаку кинематические пары подразделяются на классы. Приняты следующие обозначения:
W – число степеней свободы;
S – число связей, накладываемых на относительное движение звеньев.
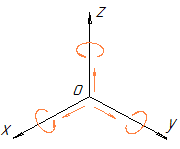
Свободное звено в пространстве имеет шесть степеней свободы. При соединении звеньев некоторые из этих степеней свободы отнимаются («накладываются связи»). Зависимость между числом накладываемых связей и оставшимся числом степеней свободы в относительном движении звеньев очевидна:
или
таким образом, существует пять классов кинематических пар (если отнять все шесть степеней свободы, то получится неподвижное соединение).
Примеры кинематических пар
На рисунке 2 приведены примеры некоторых кинематических пар.
а)
W = 5
S = 1 => I кл.
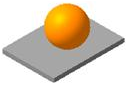
б)
W = 4
S = 2 => II кл.
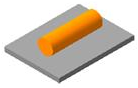
в)
W = 3
S = 3 => III кл.
Шар относительно плоскости (рисунок 2б), не отрываясь от нее, может совершать вращательные движения вокруг всех трех осей координат, а также двигаться вдоль осей «X» и «Y». При движении вдоль оси «Z» шар оторвется от плоскости, т.е. будет два свободных звена – кинематическая пара перестанет существовать. Таким образом, на относительное движение звеньев накладывается одна связь – это кинематическая пара I класса.
Аналогично без нарушения характера контакта нельзя цилиндр переместить вдоль оси «Z» и повернуть вокруг оси «Y» (рисунок 2в), т.е. число связей равно двум – пара II класса.
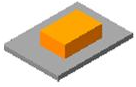
Плоскость относительно другой плоскости без нарушения характера контакта может двигаться поступательно вдоль осей «X» и «Y», а также вращаться вокруг оси «Z». Невозможно поступательное движение вдоль оси «Z» и вращательные движения вокруг осей «X» и «Y» (рисунок 2г). Таким образом, число связей равно трем – кинематическая пара III класса.
Примечание: если в кинематической паре имеются два функционально связанных движения (одно без другого существовать не может), то они дают одну степень свободы.
Например, болт с гайкой составляют кинематическую пару пятого класса. В данном случае имеется два движения гайки при неподвижном болте – вращательное движение вокруг оси болта и поступательное движение вдоль этой оси, но нельзя переместить гайку вдоль оси, не повернув ее, или повернуть гайку так, чтобы она не переместилась вдоль оси. Более того, зная параметры резьбы, легко определить зависимость между углом поворота и поступательным перемещением гайки.
Эти два движения образуют одно сложное (в данном случае – винтовое) движение. Оно определяет одну степень свободы в относительном движении этих звеньев, т.е. число связей равно пяти;
2) по характеру контакта звеньев, соединенных в кинематическую пару. По этому признаку кинематические пары подразделяются на высшие и низшие. Высшие пары имеют точечный или линейный контакт звеньев, составляющих данную кинематическую пару.
В низшей паре звенья контактируют друг с другом по какой-либо поверхности (в частном случае по плоскости).
Низшие кинематические пары обладают большей несущей способностью, т.к. имеют большую площадь контакта (в высшей паре площадь контакта теоретически равна нулю, а реально получается за счет деформации элементов кинематической пары – «пятно контакта»). Но в низших парах при работе происходит скольжение одной поверхности относительно другой, в то время как в высших парах может происходить и скольжение и качение.
Как правило, сопротивление скольжению больше, чем сопротивление перекатыванию одной поверхности относительно другой, т.е. потери на трение в высшей паре (если использовать только качение) меньше по сравнению с низшей парой (поэтому для увеличения коэффициента полезного действия вместо подшипников скольжения обычно ставят подшипники качения).
Кинематические пары, изображенные на рисунке 2б и 2в, являются высшими, а пара на рисунке 2г – низшая кинематическая пара;
3) по траектории движения точек, принадлежащих звеньям, составляющим кинематическую пару. По этому признаку выделяют пространственные и плоские кинематические пары.
В плоской кинематической паре все точки движутся в одной или в параллельных плоскостях, а траектории их движения представляют собой плоские кривые. В пространственных парах точки движутся в различных плоскостях и имеют траектории в виде пространственных кривых.
Значительное число механизмов, применяемых на практике, являются плоскими механизмами (по классификации И.И. Артоболевского – механизмами третьего семейства), поэтому необходимо более подробно рассмотреть плоские кинематические пары.
Свободное звено, помещенное в плоскость, имеет три степени свободы (поступательные движения вдоль осей координат и вращательное вокруг оси, перпендикулярной данной плоскости). Таким образом, размещение звена в плоскости отнимает у него три степени свободы (накладывает три связи). Но соединение данного звена с другим в кинематическую пару накладывает на относительное движение еще связи (минимальное число – 1). В результате на плоскости могут существовать только кинематические пары, имеющие две или одну степень свободы в относительном движении.
По общей классификации это пары четвертого и пятого классов. Простейшие пары пятого класса обеспечивают только одно движение – вращательное или поступательное (вращательная кинематическая пара в технике называется шарниром, поступательную пару по аналогии с поступательно движущимся звеном иногда также называют ползуном).
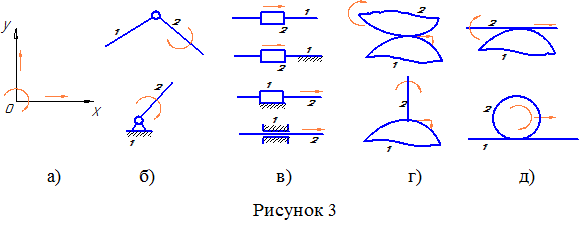
Две степени свободы в относительном движении на плоскости обычно обеспечивают два соприкасающихся профиля (на кинематической схеме контакт в точке, в реальном механизме это возможно линия, которая проецируется в точку). Таким образом, плоские кинематические пары пятого класса (шарниры и ползуны) одновременно являются низшими парами, а кинематические пары четвертого класса – высшими парами.
На рисунке 3 показано схематическое изображение плоских кинематических пар.
4) по характеру замыкания звеньев, соединенных в кинематическую пару. Существует два вида кинематических пар, отличающихся друг от друга по этому признаку. Кинематические пары с геометрическим замыканием и кинематические пары с силовым замыканием.
В парах с геометрическим замыканием конфигурация звеньев препятствует их разъединению в процессе работы. Например, присоединение шатуна к коленчатому валу при помощи шатунной крышки, или любые другие шарниры (дверь с косяком, окно с оконной рамой и т.д.).
В парах с силовым замыканием контакт звеньев в процессе работы обеспечивается постоянно действующей силой. На рисунке 2 все кинематические пары являются парами с силовым замыканием, причем в качестве замыкающей силы выступает вес. Если веса недостаточно, то обычно для создания прижимающего усилия применяют различные упругие элементы (чаще всего пружины).
Далее: