Скорости точек твердого тела, совершающего сферическое движение, в каждый момент времени определяются как их вращательные скорости при вращении вокруг мгновенной оси Ω (рисунок 3).
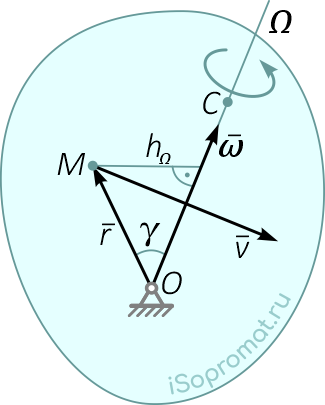
Рисунок 3
Зная положение мгновенной оси вращения Ω и угловую скорость тела ω, можно определить скорость любой точки тела M как скорость этой точки во вращательном движении вокруг мгновенной оси по известной формуле
![]()
где
r — радиус-вектор точки M, проведенный из неподвижной точки O.
Модуль скорости
![]()
где hΩ — расстояние точки от мгновенной оси вращения.
Введем подвижную Oxyz и неподвижную Ox1y1z1 системы координат аналогично рисунку 1.
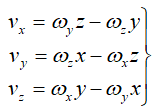
Для проекций скорости точки на неподвижные и подвижные оси получены формулы Эйлера:
- для неподвижной системы координат
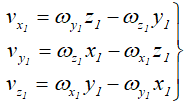
- для подвижной системы координат
Из этих формул можно получить уравнения мгновенной оси в неподвижной и подвижной системах координат, положив для точек, лежащих на мгновенной оси, все проекции скорости равными нулю.
- Для неподвижной системы координат:
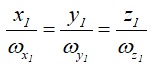
- Для подвижной системы координат:
Если положение мгновенной оси Ω уже установлено, то для нахождения угловой скорости сферического движения ω достаточно знать скорость v какой-либо точки M, не лежащей на мгновенной оси (рисунок 3).
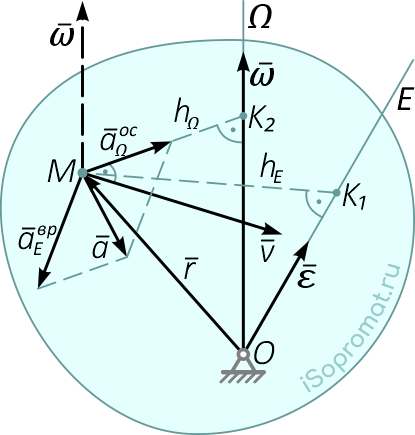
Рисунок 4
Тогда, опустив из этой точки перпендикуляр hΩ на мгновенную ось Ω, получим v = ω × hΩ, откуда

Для определения ускорения точки твердого тела служит теорема Ривальса: ускорение любой точки твердого тела при сферическом движении определяется как геометрическая сумма ее вращательного и осестремительного ускорений
![]()
где
![]()
— вращательное ускорение точки,
![]()
— осестремительное ускорение точки.
Модули этих ускорений (рисунок 4)
где
hE — расстояние от точки до оси углового ускорения E,
hΩ — расстояние от точки до мгновенной оси Ω.
Модуль ускорения точки можно найти как диагональ параллелограмма:

При сферическом движении вектор осестремительного ускорения aΩос направлен по перпендикуляру, опущенному из точки на мгновенную ось Ω, а вращательное ускорение aEвр оказывается перпендикулярно плоскости проходящей через вектор углового ускорения ε и радиус-вектор r.
Направление вращательного ускорения не совпадает с направлением вектора скорости v.
Далее: