Передаточный механизм передает движение от одного тела к другому. Параметры движения тел определяются с учетом параметров точек соприкосновения (зацепления) этих тел.
На рисунках 2.3-2.7 приведены различные схемы передачи движения от одного тела к другому: механизмы внешнего и внутреннего зацепления, ременные (цепные), червячная и фрикционная.
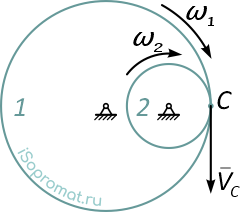
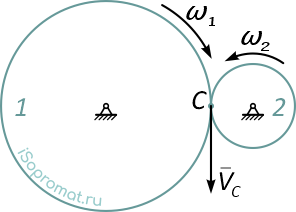
На рисунках 2.3 и 2.4 зависимости угловых скоростей колес ω определяются из соотношения их радиусов r
![]()
откуда следует
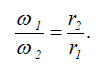
Эта зависимость угловых скоростей и радиусов колес передаточных механизмов определяет их передаточное число.
На рисунке 2.3 (внешнее зацепление) колёса вращаются в противоположные стороны, на рисунке 2.4 (внутреннее зацепление) колеса вращаются в одну сторону.
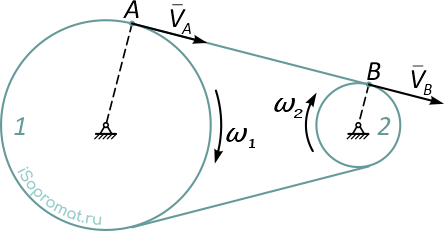
На рисунке 2.5 показана цепная (ременная) передача. Скорости точек A и B цепи должны быть равны соответственно скоростям точек AB, принадлежащих шкивам:
В передаточных механизмах червячного типа (рисунок 2.6)
вращение колеса обеспечивается поступательным движением стержня:
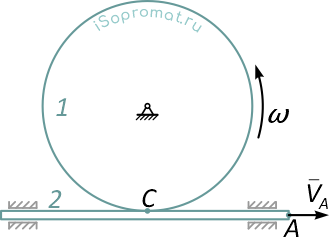
На рисунке 2.7 изображена фрикционная передача: колесо 1, прижимаясь к торцу колеса 2 в точке C, обеспечивает его вращение вокруг вертикальной оси.
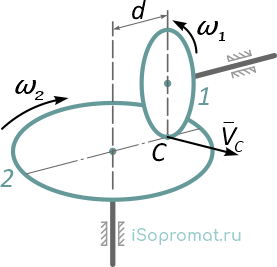
Зависимость скоростей фрикционной передачи:
Далее: