Пример решения задачи по определению величины и направления скорости и полного ускорения точки колеса, в момент времени, когда угол положения кривошипа будет равен заданному значению.
Задача
Кривошип OA, вращаясь вокруг оси, перпендикулярной плоскости чертежа и проходящей через точку O, приводит в движение колесо Ⅱ, которое катится без скольжения по неподвижному колесу Ⅰ.
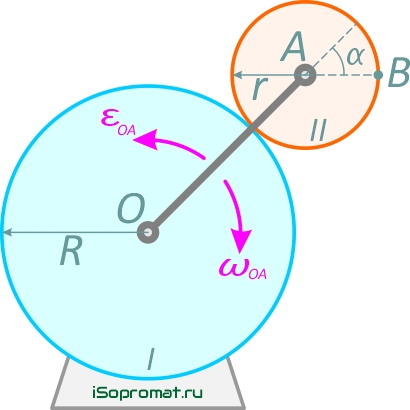
Рисунок 9
Найти скорость и ускорение точки B колеса Ⅱ, для момента времени, когда угол α = 45°, если R = 40 см, r = 20 см, ωOA = 4 с−1, εOA = 2 с−2 (рисунок 9).
Решение
Колесо Ⅱ движется в плоскости чертежа, т.е. совершает плоскопараллельное движение.
По условию, колесо Ⅰ неподвижно, значит, точка соприкосновения колес является МЦС для колеса Ⅱ.
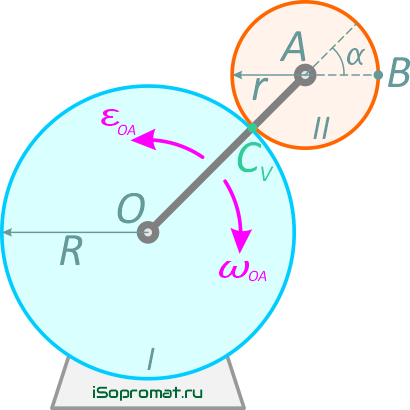
Рисунок 10
Обозначим ее как CV (эта точка не принадлежит кривошипу OA). Скорость точки B определяется выражением
![]()
и направлена перпендикулярно отрезку BCV, в сторону вращения колеса Ⅱ (рисунок 11)
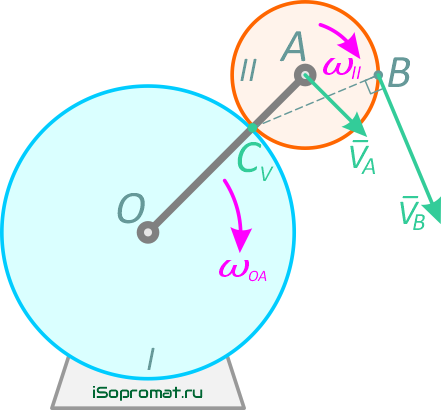
Рисунок 11
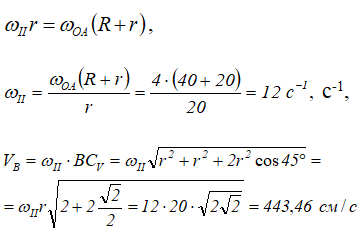
Для определения угловой скорости ωⅡ запишем выражение для линейной скорости точки A.
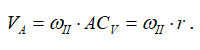
С другой стороны, точка A принадлежит кривошипу OA. Скорость точки A, принадлежащей кривошипу, определяется выражением
![]()
и направлена ⊥ OA в сторону вращения кривошипа OA. Из этих рассуждений следует:
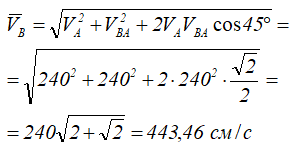
Найдем скорость точки B, используя теорему о скоростях точек плоской фигуры. Для этого примем точку A за полюс.
Тогда
![]()
Величина и направление скорости точки A определяются из условий движения кривошипа OA.
VA = ωOA × OA
и вектор VA ⊥ OA и направлен в сторону вращения кривошипа (рисунок 12).
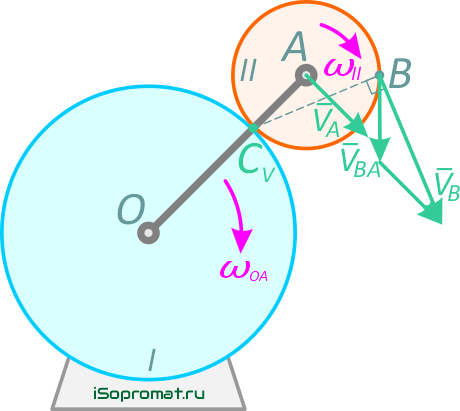
Рисунок 12
Скорость VBA — это скорость точки B во вращательном движении вокруг полюса A.
Величина скорости
VBA = ωⅡ × r = 12 × 20 = 240 см⁄с
и этот вектор направлен перпендикулярно отрезку AB в сторону вращения колеса Ⅱ.
Чтобы сложить векторы VA и VBA, перенесем вектор VA в конец вектора VBA. Соединяя начало вектора VBA с концом вектора VA, получим вектор VB. Из построения:
Определим ускорение точки B, совершающей сложное движение.
Согласно теореме об ускорении точки плоской фигуры, ускорение точки B можно определить из выражения
![]()
где aA — ускорение точки A, принятой за полюс;
aBA — ускорение точки B во вращательном движении, вокруг полюса A.
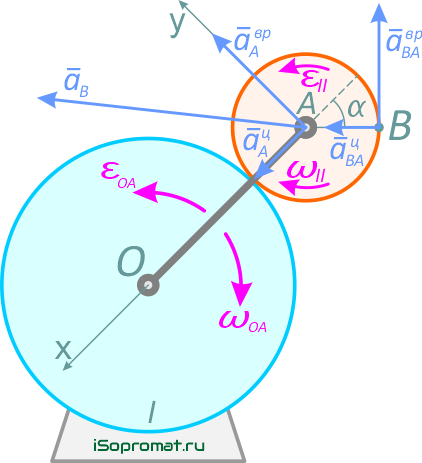
Рисунок 13
Точка A – принадлежит колесу Ⅱ и кривошипу OA, движение которого известно, тогда
Ускорение aBA (ускорение во вращательном движении) состоит из двух слагаемых:
![]()
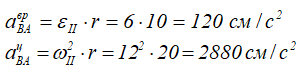
где
Найдем угловое ускорение второго колеса εⅡ по определению:
Подставляя числовые значения, получим
тогда
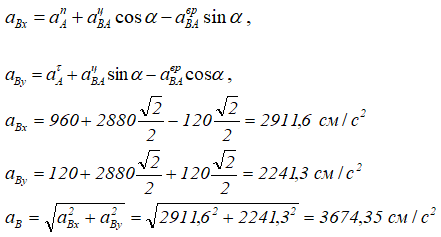
Ускорение точки B найдем, спроецировав все векторы уравнения
![]()
на выбранные оси координат OX и OY.
Углы, которые составляют вектор ускорения aB с осями OX и OY, определим через направляющие косинусы.
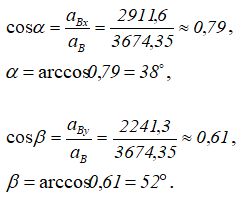
Скорость и ускорение точки B колеса Ⅱ, для момента времени, когда угол α = 45° найдены.
Далее: