Пример решения задачи РГР Д10 по определению скорости тела (груза) механической системы в тот момент, когда пройденный им путь станет равным значению s, учитывая трение скольжения и сопротивление качению тела, но пренебрегая другими силами сопротивления.
Задача
Механическая система под действием сил тяжести приходит в движение из состояния покоя.
Учитывая трение скольжения тела 1 и сопротивление качению тела 5, катящегося без скольжения, пренебрегая другими силами сопротивления и массами нитей, предполагаемых нерастяжимыми, определить скорость тела 1 в тот момент, когда пройденный им путь станет равным s.
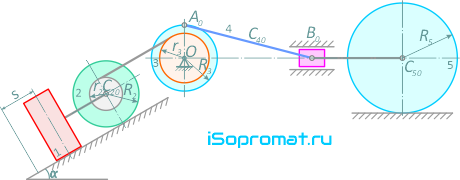
Дано: m1 – масса груза 1, m2=2m1, m3=m1, m4=0,5m1, m5=20m1, R2=R3=12см, r2=0,5R2, r3=0,75R3, R5=20 см, AB=l=4R3, i2ξ=8см, i3x=10см, α=30°, ƒ=0,1, δ=0,2см, s=0,06π м.
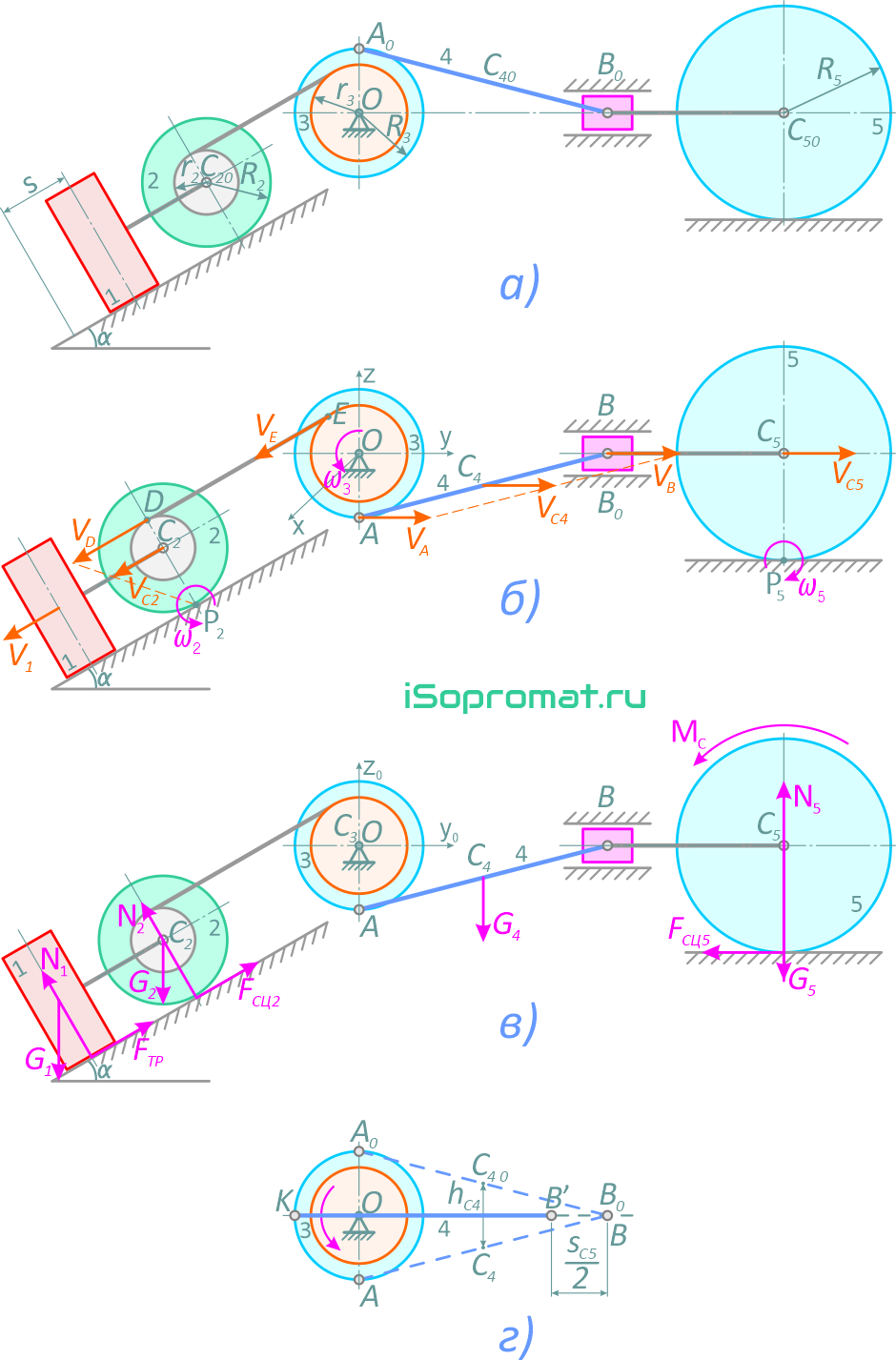
Сопротивление качению тела 2 не учитывать. Шатун 4 считать тонким однородным стержнем; каток 5 – однородный сплошной цилиндр. Массами звена BC5 и ползуна B пренебречь. На рисунке 2, а показана механическая система в начальном положении.
Найти: ν1 – скорость груза 1 в конечном положении.
Пример решения
Применим теорему об изменении кинетической энергии системы:
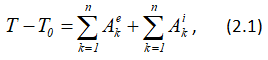
где T0 и T – кинетическая энергия системы в начальном и конечном положениях; ∑Ake – сумма работ внешних сил, приложенных к системе, на перемещении системы из начального положения в конечное; ∑Aki – сумма работ внутренних сил системы на том же перемещении.
Для рассматриваемых систем, состоящих из абсолютно твердых тел, соединенных нерастяжимыми нитями и стержнями, ∑Aki = 0.
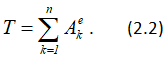
Так как в начальном положении система находится в покое, то T0=0.
Следовательно, уравнение (2.1) принимает вид
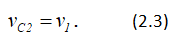
Для определения кинетической энергии T и суммы работ внешних сил изобразим систему в конечном положении (рисунок 2.1, б, в).
Напишем кинематические соотношения между скоростями и перемещениями точек системы, т.е. уравнения связей, при этом скорости и перемещения выразим соответственно через скорости и перемещения груза 1.
Скорость центра масс C катка 2 равна скорости груза 1:
Угловая скорость катка 2, мгновенный центр скоростей которого находится в точке P2,

Скорость точки D катка 2
Скорость точки E блока 3 равна скорости точки D катка 2:
![]()
Но vE = ω3r3. Следовательно, по (2.5),
Так как R2 = 2r2, то
откуда
Заменяя в формуле (2.6)
получим
После интегрирования (при нулевых начальных условиях)

Когда груз 1 пройдет путь s = 0,06π м, блок 3 повернется на угол φ3:
При этом повороте блока 3 на 180º его точка A0 перейдет в конечное положение A и шатун 4 из начального положения A0B0 перейдет в конечное положение AB.
Каток 5 переместится влево при повороте блока 3 на угол π/2 и вправо при повороте блока еще на π/2; значит, конечное положение катка 5 совпадает с его начальным положением.
Таким образом, конечное положение всей системы вполне определено (рисунок 2.1, б).
Вычислим кинетическую энергию системы в конечном положении как сумму кинетических энергий тел 1, 2, 3, 4, 5:
Кинетическая энергия груза 1, движущегося поступательно,
Кинетическая энергия катка 2, совершающего плоское движение,
где J2ξ — момент инерции катка 2 относительно его продольной центральной оси C2ξ:
![]()
Подставляя (2.3), (2.4), (2.11) в формулу (2.10), получаем

Кинетическая энергия тела 3, вращающегося вокруг оси Ox,
где J3x — момент инерции блока 3 относительно оси Ox:
Подставляя (2.6), (2.14) в формулу (2.13), получаем

Кинетическая энергия шатуна 4, совершающего плоское движение,
где vC4 — скорость центра масс C4 шатуна 4; ω4 — угловая скорость шатуна 4; J4ξ — момент инерции шатуна относительно центральной оси C4ξ.
Для определения vC4 и ω4 найдем положение мгновенного центра скоростей шатуна 4. Так как скорости точек A и B в этот момент параллельны, то мгновенный центр скоростей шатуна 4 находится в бесконечности; следовательно, угловая скорость шатуна в данный момент ω4=0, а скорости всех его точек параллельны и равны между собой. Таким образом, кинетическая энергия шатуна 4

Вращательная скорость точки A тела 3
![]()
или с учетом (2.14)
Поскольку r3 = 3/4 R3, получим vA = 2v1.
![]()
После подстановки (2.19) в (2.16) выражение кинетической энергии шатуна 4 принимает вид
Кинетическая энергия катка 5, совершающего плоское движение,
где vC5 — скорость центра масс C5 катка 5; ω5 — угловая скорость катка 5; J5ξ — момент инерции катка 5 (однородного сплошного цилиндра) относительно его центральной оси C5ξ, J5ξ = m5R52/2.
Так как каток катится без скольжения, то мгновенный центр скоростей находится в точке P5.
Поэтому ω5 = vC5/R5.
Следовательно,
Так как звено BC5 совершает поступательное движение, то vC5 = vB, но vB = vC4 = 2v1. Значит, vC5 = 2v1.
Поэтому выражение кинетической энергии катка 5 принимает вид

Кинетическая энергия всей механической системы определяется по формуле (2.8) с учетом (2.9), (2.12), (2.15), (2.20) и (2.21):
Подставляя сюда заданные значения масс, получаем
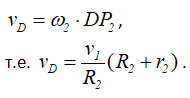
Найдем сумму работ всех внешних сил, приложенных к системе, на заданном её перемещении (внешние силы, приложенные к системе, показаны на рисунке 2.1, в).
Работа силы тяжести G1

Работа силы трения скольжения Fтр
![]()
Так как
![]()
то
![]()
Работа силы тяжести G2
![]()
Работа сил сцепления Fсц2, Fсц5 катков 2 и 5 равна нулю, т.к. эти силы приложены в мгновенных центрах скоростей этих катков.
Работа силы тяжести G4
![]()
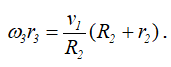
где hС4 — вертикальное перемещение центра тяжести С4 шатуна 4 из начального положения в его конечное положение (рисунок 2.1, г), hС4 = R3:
Работа пары сил сопротивления качению катка 5
![]()
где MC = δN5 = δG5 — момент сопротивления качению катка 5; φ5 — угол поворота катка 5.
Так как каток 5 катится без скольжения, то угол его поворота
где sC5 — перемещение центра тяжести C5 катка 5.
В данном примере работу пары сил сопротивления вычислим как сумму работ этой пары при качении катка 5 влево при повороте тела 3 на угол π/2 и качении вправо, когда тело 3 повернется еще на угол π/2. Перемещение центра тяжести C5 катка 5 равно перемещению ползуна B влево и вправо:
![]()
Определим перемещение B0B’ при повороте тела 3 на угол π/2. За начало отсчета координаты точки B выберем неподвижную точку K плоскости (рисунок 2.1, г). При этом повороте тела 3 шатун из положения A0B0 перейдет в положение KB’.
Тогда
Следовательно,
Подставляя (2.31) и (2.30), а затем в (2.29), находим полный угол поворота катка 5:
Работа момента сопротивления качению по (2.28)
Сумма работ внешних сил определится сложением работ, вычисляемых по формулам (2.23) – (2.27) и (2.33):
Согласно теореме (2.2), приравняем значения T и ΣAke, определяемые по формулам (2.22) и (2.34):
откуда v1 = 0,21 м/с.
Далее: